Immersive Stereotomy
Vienna 2024
Master Thesis

Project Pitch
Immersive Stereotomy explores the potential of using VR to interactively design and fabricate with robotic wire-cutting for a streamlined process from architectural design to fabrication.
It promotes a new fabrication-informed design-to-production workflow that combines human intuition with robotic precision.

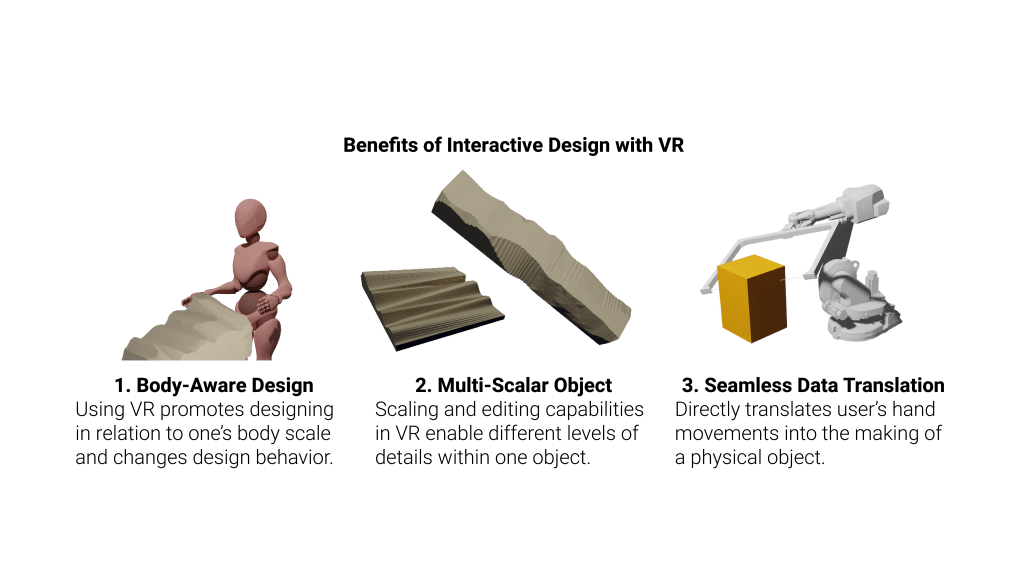
A workflow is developed to translate human movements into robotic motions. The workflow is split into 3 main stages, which the project focuses on the second and third. The user can draw, cut and compose the scene in first person perspective. One can also scale objects up or hide certain parts to create more details. This workflow aims to engrave the logic of making into the surface geometry.

Teahouse
Of most building types, teahouse has one of the highest expectations of craftsmanship and integration of furniture to the building, thus chosen as a proof of concept. Programmatically, it is organized from the more collective to smaller group gatherings. On the ground floor, it is the exhibition and event room, an uninterrupted open landscape that is free to explore. The first floor is the joint tea hall, with fragmented terraces and different furniture to engage with. On the top are private tea rooms in small compartments, separated by the curving walls that are still open to the outside, while remaining certain privacy.










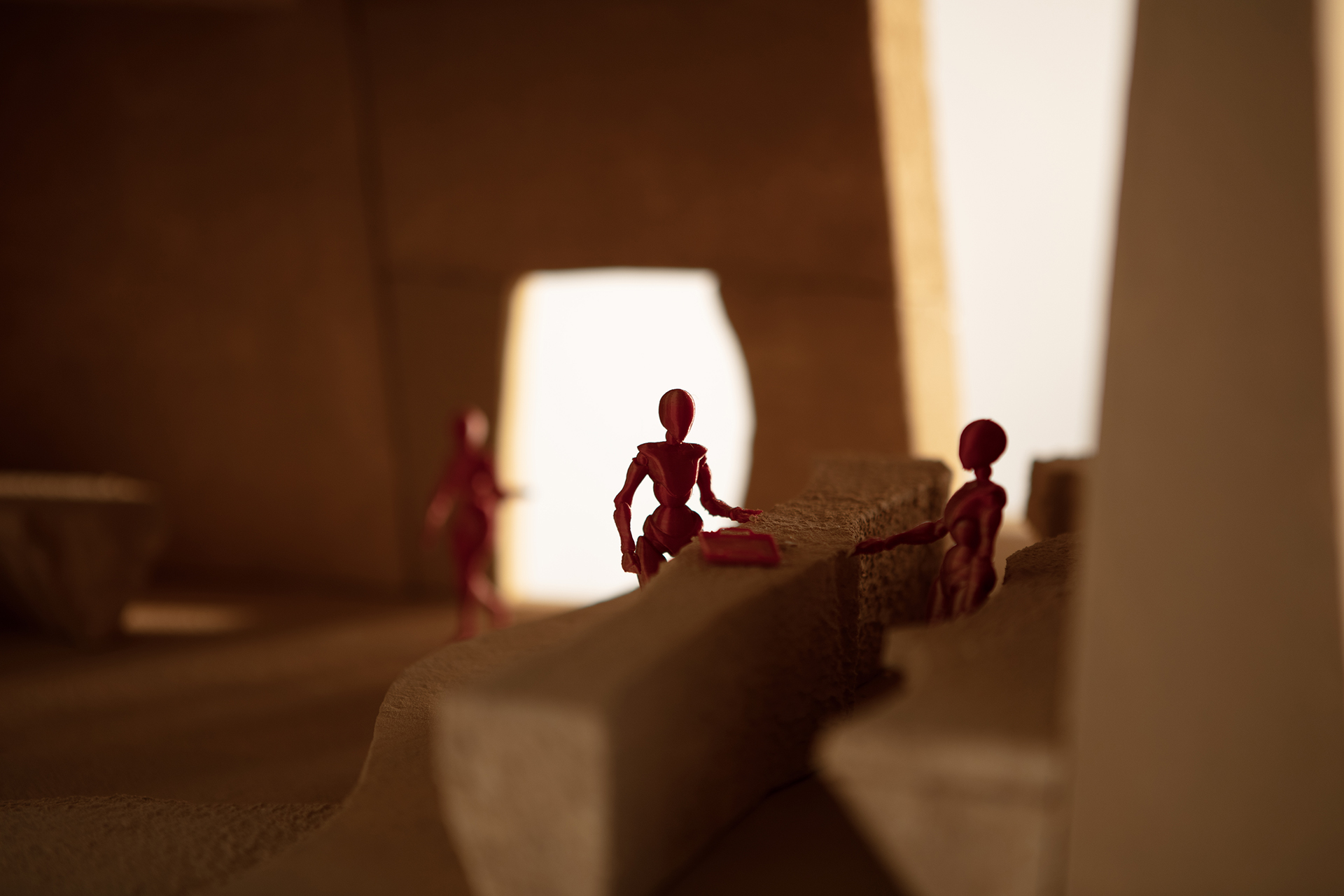
Body-Space Relationship
The project aims to redefine the relationship between the body, space, and production by including the craft of hand-making in the design process. The entire teahouse here is virtually cut and composed, also every piece is unique. This process allows more integration of the furniture into the spaces, as they are considered holistically and experienced with first person perspective.

Usually, stone is cut with a diamond wire, but for the production of the 1:20 physical model, I use hot wire to cut foam here at the ddplab, which works with similar principles and volumetrics. The making of a chunk of the building includes making of a new tool, programming of the robot and cutting around a hundred pieces in two weeks time.

For the assembly, it uses the post tensioned stone system within the walls, slabs, columns, where the blocks are assembled into strips, and strips into slabs.










Credits and Data
Thesis Reviewer:
Prof. Greg Lynn
Prof. Efren Garcia Grinda
Prof. Sam Jacob
Prof. Wolf Mangelsdorf
Prof. Petra Gruber
Prof. Brian Cody
Prof. Baerbel Muller
Prof. Tulay Atak
John McMorrough
Studio Assistants:
Bence Pap
Kaiho Yu
Maja Ozvaldic
Robotic Lab:
Afshin Koupaei
Final Thesis Presentation:
AAA Angewandte
Immersive Stereotomy is exhibited as part of the Angewandte Festival 2024.
